在磁浮列車的工程實踐中,電磁噪聲的存在明顯降低了懸浮控制系統的性能,導致列車轉向架振動,同時電磁鐵因為電流變化迅速會產生很大的噪聲,因而必須采取措施減小噪聲的影響。但是,一般的濾波器設計并不能很好地解決問題。本文在分析傳感器信號中噪聲特性的基礎上,提出了通過避開主要噪聲持續時間進行A/D采樣的方法。實驗證明了該方法的有效性和實用性。
1 系統組成
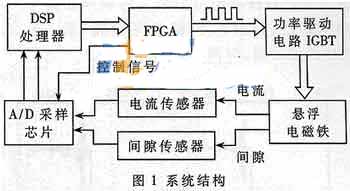
懸浮控制系統由DSP、FPGA、A/D轉換器、傳感器、功率斬波器和電磁鐵等單元組成。控制的目的是保持電磁鐵與軌道之間的距離恒定,為磁浮列車提供穩定的支撐。系統結構見圖1。其中A/D轉換器采用MAXIM公司的MAX125,它是一種帶同步鎖存的14位4輸入A/D轉換芯片,4路同時工作時最高采親友速率為76ksps,用于采樣傳感器的輸出信號。DSP采用ADI公司的ADSP2181,用于控制算法的計算。FPGA采用ALTERA公司的EPF6016,用于產生PWM波和實現一些輔助功能。傳感器包括間隙傳感器和電流傳感器。功能驅動彩IGBT組成的半H橋網絡,如圖2所示。功率管T1、T2由PWM波形驅動。PWM波為高電平時導通,低電平時關斷,功率管關斷時通過功率二極管D1、D2續流。圖中的A是吸引網絡,防止反沖電壓過高損壞器件。該電路的特點是:當一個周期內T1、T2導通時間小于50%時,電磁鐵上電流為0。

2 降噪算法原理
在懸浮控制系統中,噪聲具有其自身的顯著特片。觀察間隙、電流等傳感器的輸出信號可以看到,除了幅值不大的白噪聲外,主要是與斬波器PWM頻率相關的脈沖噪聲。圖3是試驗中示波器測量到的波形,其中2通道顯示的FPGA輸出的PWM驅動波形,1通道顯示的是間隙傳感器的輸出波形。從該圖可以看出二者之間的對應關系:傳感器輸出信號上的噪聲在每個PWM周期內出現兩次,分別在PWM電平翻轉(低-高,高-低)1μs之后開始出現,時間大約持續3μs.
該噪聲是由功率管開關動作引起的,幅值很大是影響懸浮性能的主要噪聲。它并不是白噪聲,在時域上它是具有很大能量和一定寬度的脈沖,一旦被采樣到,就會對控制性能產生較大影響,甚至會導致系統失控;在頻域上,它的頻譜分布在從低頻到高頻的較大范圍內,一般的濾波方法對其無能為力。
通常采用多次采樣取中間值的辦法來消除強噪聲的影響。這種方法在克服噪聲方面是有效的,但存在兩個缺點:(1)信號采集所需時間長,影響總的計算時間;(2)得出的信號序列不是等間隔的,無法對信號進行差分運算。這些缺點直接影響了控制器的設計,因而必須尋找新的解決途徑。